TED TALKS
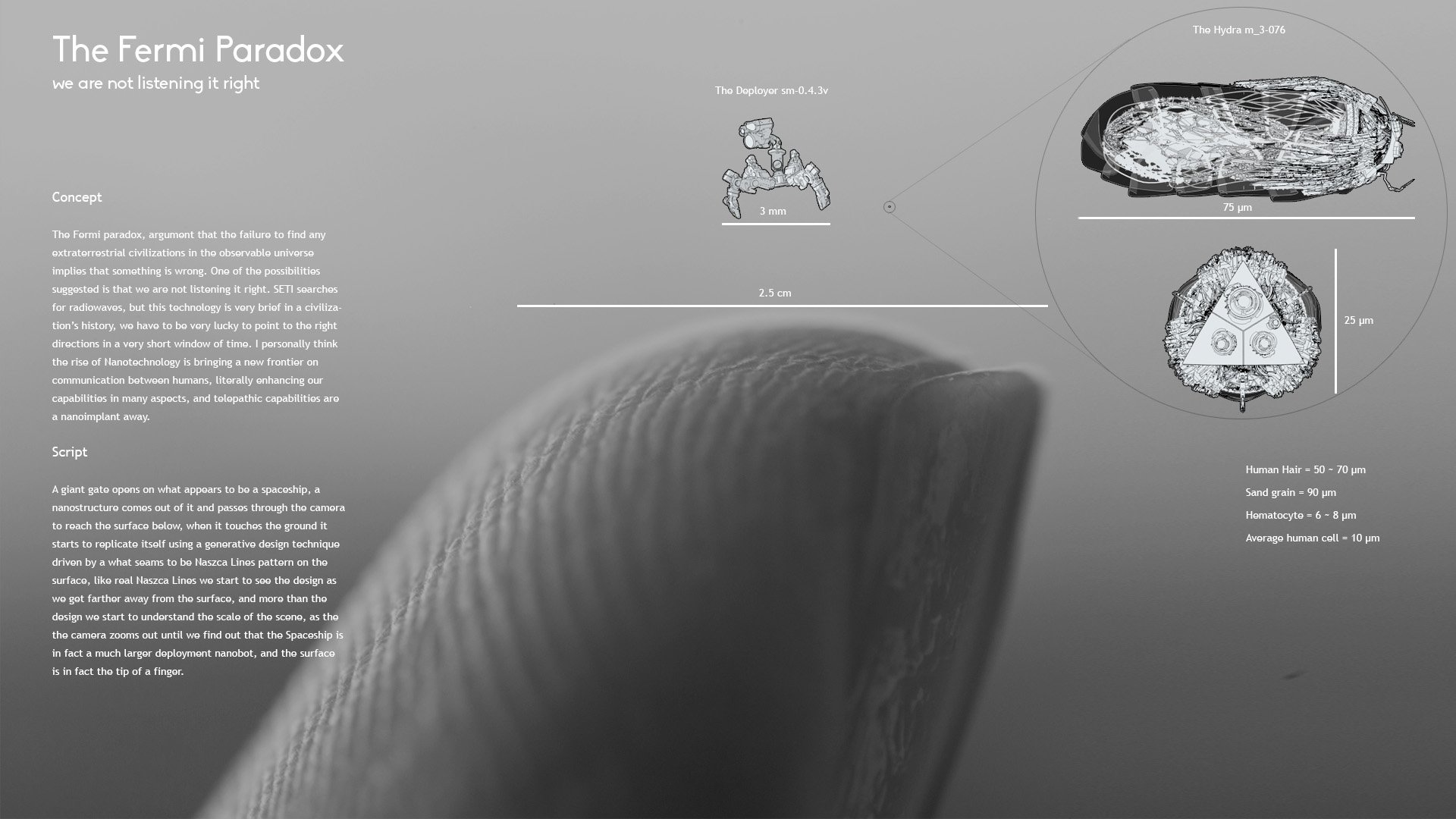
FIGHTERS | THE FERMI PARADOX
Director | AUTHOR
TED GLOBAL | South Experiment
TED Global and Cubocc invited me to be one of the artist and creators behind the Title Opening for each speaker in the Brazilian event. I was honored to be among so many talented artists and be a part of the event that I have in high regards.
The briefing was very open, create some appealing visual animated art piece but with a deep and meaningful story. Here is mine: